 -
-|
Cette page est un peu lourde... photos + texte = 2,5Mo |
-


Pour les pressés, voici en résumé son histoire : Depuis tout petit, l'idée de construire un sous-marin modéle réduit me séduisait (Private Joke : entre la caravane tiré par un vélo et tant d'autres choses, n'est ce pas maman ![]() ). Dans un passage de ma vie où j'ai particulièrement eu besoin de m'occuper l'esprit, alors que ni mon budjet, ni mon statut d'étudiant n'y était propice, je me suis lancé dans l'aventure sans vouloir penser aux conséquences. Novembre 2001, premier coup de scie... Ayant besoin de voir autre chose, je me suis parallèlement inscrit pour un an d'étude en Allemagne , et me voilà bloqué. Déjà, la coque était bien avancé, le choix d'utiliser un capteur de pression et une puce électronique pour tout gérer était pris.
). Dans un passage de ma vie où j'ai particulièrement eu besoin de m'occuper l'esprit, alors que ni mon budjet, ni mon statut d'étudiant n'y était propice, je me suis lancé dans l'aventure sans vouloir penser aux conséquences. Novembre 2001, premier coup de scie... Ayant besoin de voir autre chose, je me suis parallèlement inscrit pour un an d'étude en Allemagne , et me voilà bloqué. Déjà, la coque était bien avancé, le choix d'utiliser un capteur de pression et une puce électronique pour tout gérer était pris.
Devant le nombre de mails de plus en plus grand que je reçois par des gens voulant ce lancer après la lecture de cette page, je veux informer qu'elle représente plus un pense-bête que le reflet de la réalité : Je ne suis sûr de rien puisque le modèle ne navigue pas encore ! Donc même si ça parait séduisant, sachez que c'est un travail de longue halène, et que même si je suis toujours disposé à donner un coup de main, je n'ai pas de solution miracle, et ça n'en diminura pas votre quantitée de travail...
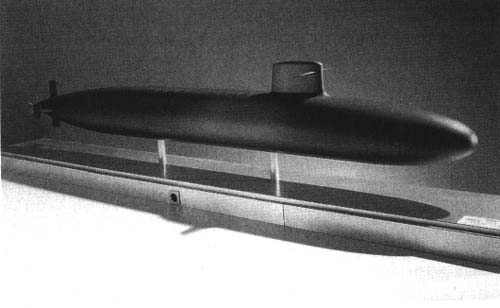
Une recherche minutieuse sur internet à permis de rassembler une quinzaine de photos, mais cela n'a pas été facile, car aucun site ne les regroupes, sans compter qu'elles sont souvent dans une taille de mouchoir de poche ... Il est à noter que les photos à sec ne montre pas les gouvernes de directions ... au départ, je pensais qu'il sagissait d'un modèle différent, que la direction était donnée par les deux petits ailerons aux extrémités de la barre de profondeur ! Les photos ont donc été rassemblées pour l'occasion ici.
Les caractéristiques du modèle qui nous intéresse pour un modèle réduit sont :
La seule maquette trouvé sur internet au stade du tracé des couples est celle-ci sur ce site; elle montre une poupe différente que ce que l'on trouve sur les photos du vrai (une simplification je suppose) :
Pourquoi ce choix ? C'est vrai que pour quelqu'un de pacifiste comme je peux l'être, ce choix peut paraître étrange. Pourquoi un sous-marin ? Parce que le monde de la mer m'a toujours attiré, et que la complexité de la gestion d'un sous-marin donne du piment et une dimension supplémentaire au plaisir de la conception-réalisation-réglages-navigation que l'on peut avoir pour un bateau, au plaisir de maîtriser chaque maillon et aboutir à quelque chose qui marche ! Pourquoi un sous-marin militaire plutôt que civil ? parce que je voulais une forme profilé pour avoir une bonne vitesse (pour courir après les canards par exemple lol) et puis les gadgets que l'on peut y installer (ici jet d'eau) sont plus rigolo que sur un modèle civil ... Mais quel plaisir pour un modèle qu'on ne voit pas naviguer ?!! Justement, on le verra, mais quand on s'y attend le moins, et puis comme le disait un prof après une démonstration magistrale de représentation des phénomènes physique ( ![]() ) qui servait à rien : C'est pour la bauté du geste ... Pour une prose plus détaillée sur le sujet, je propose d'aller lire le site d'un autre grand enfant ici !
) qui servait à rien : C'est pour la bauté du geste ... Pour une prose plus détaillée sur le sujet, je propose d'aller lire le site d'un autre grand enfant ici !
Commencé début novembre 2005, Il sera réalisé au 1/100ième, il aura donc les dimensions suivantes :

Cette échelle à été choisi pour disposé d'un volume suffisant pour loger les batteries sur toute la largeur [à tel point que les renflements des flans me font gagner les quelques miliméttre pour quelles rentrent exactement], me permettant de garder de la place pour les gadget, tout en étant minimum pour que le modèle rentre dans mon coffre ( J'avoue, c'est juste ! )
L'idée était de construire un sous-marin exploitant au maximum la capacité des moteurs pour laisser les autres navires RC sur place, pouvant s'auto maintenir à une profondeur fixée, et pouvant tirer de l'eau comme projectile à grande distance, ayant des propulsions d'étraves pour naviguer facilement dans les petits plans d'eau ou piscine et ayant de quoi s'éclairer pour naviguer de nuit ... Le tout alors que ma boite à outils d'étudiant est assez rudimentaire ! (notamment pas t'étau ![]() ... ...jusqu'à ce que je craque pour un tout petit à 7€ ) Les 4 sous-marins de la classe du Triomphant offrent une élégance par leurs formes et une poupe exotique qui a arrêté mon choix.
... ...jusqu'à ce que je craque pour un tout petit à 7€ ) Les 4 sous-marins de la classe du Triomphant offrent une élégance par leurs formes et une poupe exotique qui a arrêté mon choix.
L'objectif en terme de temps en septembre 2005 était de naviguer à la 7ième rencontre européenne du sous marin modèle réduit en Juin 2006. Mi Avril 2006, je suis sceptique, c'est à l'eau (ou plutôt pas encore  ) et une nouvelle échéance est fixé : septembre 2006, rencontre au Lac de Sanguinet dans les Landes (40), et ce sera encore raté, pour cause d'un an d'étude en Allemagne.
) et une nouvelle échéance est fixé : septembre 2006, rencontre au Lac de Sanguinet dans les Landes (40), et ce sera encore raté, pour cause d'un an d'étude en Allemagne.
Le sous-marin Triomphant n'est pas symétrique sur l'axe proue/poupe:

Et malgré ce que suggère cette image, il est plus plan sur le dessus pour que les marins puissent y marcher. Les couples ont été recréé un par un en utilisant l'équation d'une ellipse ( ![]() soit
soit ![]() pour chaque coté ) de manière que le rayon supérieur et le rayon inférieur soient cohérent avec les données que je peux avoir, et que la suite des rayons latéraux soit harmonieuse et colle avec les photos disponible. Voici une illustration de la suite des couples :
pour chaque coté ) de manière que le rayon supérieur et le rayon inférieur soient cohérent avec les données que je peux avoir, et que la suite des rayons latéraux soit harmonieuse et colle avec les photos disponible. Voici une illustration de la suite des couples :

J'ai donc du réalisé deux demi-moules. Voici le patron que je me suis créé :

Et oui, en chambre universitaire, le rôle du plan de travail est joué par ce qui tombe sous la main, ici mon lit ![]()
Après moult découpes de couples en carton, mon choix s'est arrêté à cet assemblage de 22 (+ 5) couples :
Quand je vous disais que je me suis attaché à suivre scrupuleusement les données dont je disposais, en voici de belles illustrations :
|
 |
Suivant le plan ci-dessus donc, deux demies coques ont été réalisées par des couples recouverts de balsa comme le montre ces photos (après un petit ponçage ![]() ) :
) :

...puis masticage ...

![]()

![]()
Ce qui n'a pas été aussi facile que l'on pourrait le penser ... comme le montre les photos sur cette page.
Ensuite, pour me permettre de stratifier l'intérieur dans ma chambre universitaire, le sous-marin a été peint pour être sûr qu'il n'y ai aucun orifice à part l'avant et l'arrière. Ainsi, après avoir monter un ventilateur de PC à une extrémité, mis de la patafix® tout le long de la jointure, la stratification a pû commencer :

![]()
Par la suite, je n'ai plus utilisé ce système assez contraignant, car avec la fenêtre un peu ouverte, il y a tellement de courant-d'air sous la porte des chambres de cité-U que les odeurs ne restent pas trop longtemps dans la chambre.
La pression exercée sur un objet immergé est de 1 kg/cm² tous les 10 mètres, ici, à 4m, elle sera donc de 400g/cm² à profondeur maximale, ce qui n'oblige pas à construire particulièrement massivement.
Le modèle sera réalisé en fibre de verre et résine polyester (±3Kg de résine et ±2Kg de fibres, soit 6m² en 350g) ce qui donne une épaisseur de coque de 3 à 5mm.
Après un ponçage qui m'a paru éternel, “collage” du kiosque, et perçage des différents orifices :

![]()
On se prépare à creuser les trappes pour la sortie des ogives :

par un moulage de la forme du pont :

puis contre-moulage des trappes :
passage de l'apret avant ( ![]() ) :
) :
Une plaque de PVC de 2mm d'épaisseur a été déformé à l'eau bouillante autour du patron découpé dans du contre plaqué, puis cirée, et stratifiée. ( voir le numéro 9 sur la photo parlant des turbines )
Les gouvernails ont été taillé dans une plaque de résine/fibre de verre moulé sur une vitre :

Sur les bâtiments grandeurs natures, ils disposent en plus des ballasts de régleurs qui leurs permettent de maintenir une assiette nulle malgré le déplacement de l'équipage et du matériel dans le sous-marin. Ici, cela sera pareil (de part la nourriture qui représente une perte de poids), mais on ne disposera pas des régleurs ![]() . Pour que l'assiette reste nulle il faut que la poussée d'Archimède et le poids s'applique sur des centres de gravités sur la même verticale; il «suffit» de faire coïncider :
. Pour que l'assiette reste nulle il faut que la poussée d'Archimède et le poids s'applique sur des centres de gravités sur la même verticale; il «suffit» de faire coïncider :
Cela évite la création de torseur dû au couple qui apparaîtrait, et modifierait l'assiette.
Cela ne peut pas être fait par le calcul, enfin avec mes moyens, car il faudrait que je connaisse exactement le poids de tous les éléments présents à l'intérieur, que j'en calcul le barycentre, que je calcule celui du volume d'eau déplacé pour la poussée d'Archimède, ce qui est complexe vu la forme élaboré du bâtiment (que j'essaie d'approcher, mais qui sera forcément pas fidèle au millimètre près ! et donc fausserai les calculs !)
Pour illustrer ce qui se passerait si tout n'était pas prévu correctement à l'avance, il est plus facile d'utiliser une forme arbitrairement irrégulière. ![]() Sur les schémas suivant, en pointillé bleu est le niveau de l'eau, la flèche rouge est l'application du poids
Sur les schémas suivant, en pointillé bleu est le niveau de l'eau, la flèche rouge est l'application du poids ![]() sur le centre de gravité, la flèche bleu l'application de la poussée d'Archimède
sur le centre de gravité, la flèche bleu l'application de la poussée d'Archimède ![]() sur le centre de gravité du volume d'eau déplacé :
sur le centre de gravité du volume d'eau déplacé :


Ici juste la poussée d'Archimède ![]() change de point d'application, mais il ne faut pas oublier que le poids des ballasts et de la réserve de gaz (si je retiens ce système de plongée) pourrait aussi changer le point d'application de
change de point d'application, mais il ne faut pas oublier que le poids des ballasts et de la réserve de gaz (si je retiens ce système de plongée) pourrait aussi changer le point d'application de ![]() ...
...
Les différents équilibres ont été mis en place in-situe, en mettant régulièrement le modèle à l'eau pour vérifier qu'on ne s'en écarte pas trop.
L'organisation finale adoptée sera alors celle là :
 |
 |
|
|
|
|
|
|
|
On remarquera que la batterie au plomb est dans un compartiment pour elle seule. En effet, fort du bruit qui court sur les sous marins-modèle réduit qui ont explosé à cause de l'hydrogéne libéré par la batterie, brûlée grâce aux étincelles des moteurs, j'ai préféré faire comme cela, même si théoriquement, le dégagement d'hydrogène n'existe qu'à la charge lors de la réaction de double sulfatation :
PbO2 + 4H+ + Pb ![]() 2Pb2+ + 2H2
2Pb2+ + 2H2
l'autre réaction condéré comme existant qu'a la charge, et surtout lors de surcharge existe cependant en permanence, mais leurs cinétiques est faible lors de décharge, repos et début de charge.
| { | 3H2O+ → ½O2+2H3O+ + 2e- | H2O |
| 2H3O+ + 2e-← 2H2O+H |
Cette réaction s'amplifie en fontion de la température, l'état de la batterie qui peut être sulfatée en fonction de son age. Pour mémoire, le 22 octobre 1983, près du port de Sète, quand la « Doris III» (classe Daphné) a eu son compartiement batterie qui a explosé. Les marins rescapés tentent de se retrouver ici .
Avec des batteries à electrolyte gélifié, je pense que cela peut être négligé, mais comme on est dans un environnement clos particulièrement petit, on choisira le principe de précaution !
Il y aurait un autre cas : De retour en pause, après une grosse sollicitation de la batterie que celle-ci se "régénérerait" et dégagerait à ce moment de l'hydrogène. Si vous en savez plus, dites le moi !
D'autres distributions des éléments auraient pu être envisagée, mais entre le travail déjà éfectué et l'évolution des contraintes au fur et à mesure de la construction font que l'on est arrivé à celle présenté.
Il était prévu de mettre suffisamment de batterie de telle sorte qu'il n'en ai pas besoin. En effet, cela c'est vérifié [il était même un peu trop lourd par rapport à la ligne de flotaison prévu], mais par contre, les contraintes d'organisation de l'espace dû aux choix fait pour les missiles etc, font que le modèle à un centre de gravité un petit peu trop haut (sans le kiosque, le modéle restait à l'équilibre, avec, il se couche) donc, du lest et des poches d'air seront ajoutés dans les parties libres d'eau qui reste pour corriger tout ça. Cette modification est faite sous la ligne de flotaison pour que les ballasts ne voivent pas leurs volumes augmentés.
Le lest qui n'en est donc pas un, sera au final de XXX Kg
Le système par réserve de gaz embarqué n'a pas été retenu,(bien qu'une version se basant sur la récupération du reste des gazs de propultion des bombes du marché, comme les déodorants, les anti-moustiques... ait été tesé : il ne reste du gaz que pour 2 ou 3 prise de surface) car je ne voulais pas être limité dans mon nombre de prise de surface, celui par seringue remplie ou vidé grâce à une vis sans fin non plus, car il prends de la place et dans mon submersible, je suis assez à l'étroit vu les options présentes. Celui par baxter non plus, car le système de pompe pour le remplir et le vider n'a pas l'air très fiable au vu de l'expérience de certains... Pour utiliser l'espace non utilisé mais dont la forme est non exploitable, il est possible d'y pomper de l'air (ou y purger l'eau) par un mât une fois prés de la surface. c'est pas un système très sécurisant, mais étant donné le manque de place ...
Alors un mix des deux dernières solutions à été retenue, un baxter maison pour optimiser sa forme, réalisé dans de la bâche pour bassin d'ornement. cette poche est étiré ou comprimé par une plaque collé dessus déplacé par un servo.
Après un système mécanique mis au point (détaillé ici), la découverte du MPX2100 de motorola à tout remis en cause. Elle sera donc géré éléctroniquement par le PIC 16F877. Une profondeur sera donnée au sous-marin, et suivant qu'il avance ou non, le microcontrôleur s'ingénira à la conserver en actionnant les barres de plongées ou les ballasts.
Le secret qui réside autour de la fameuse pompe-hélice de cette classe de sous marin donne une certaine liberté de conception vu que personne ne sait vraiment ce qui ce trouve dedans :
Mon interprétation, nécessairement fausse au vu de l'aire de l'entrée, de la sortie et de l'intersection de la pompe avec la coque, est une pompe logée dans la coque comme sur cette illustration très simplifiée :

Il n'y a donc pas d'hélice !! Enfin pas proprement dit, il y a bien un truc à ailette qui tourne, mais sans forme particulière : observez les moteurs des pompes d'aquarium et vous comprendrez. Utiliser cette méthode m'a permis d'éviter l'achat d'hélices de grands diamètres (peu de choix pour les sous-marins), difficilement intégrable (bien que j'eusse fait des plans pour des diamètre 80 un jour ...) et puis l'idée du rendement de ces hélices m'agaçaient aux vues de mes objectifs. (cavitation [sur les modèles réduits, ça existe ?], perte par force centrifuge). Pour éviter cela je comptais me fabriquer des hydro-jets, mais un jour ça à fait tilt, une pompe d'aquarium de 55W (la puissance d'un des deux moteurs que j'utilisais sur le Ladoréfaré) donne un débit de 3000L/h, soit 0.83L/s, presque une bouteille de lait par seconde, ça doit donner un meilleur rendement ! me voilà dans la phase de test.
Après avoir démonter mon transfo 12V/220V de mon camping-car 205, j'ai pu essayer ... ...en fixant la pompes d'aquarium au cul d'un bateau que j'avais fait adolescent, et en comparant les vitesses avec la motorisation d'origine... Ce fut d'ailleurs assez laborieux !
Les avantages sont :
Quelques essais de réalisations sont visibles ici. Une extrapolation des dimensions (étant donné que je n'ai pas trouvé de pompe de 200W que je puisse démonter pour examiner la taille), et me voilà avec ma turbine adapté à mon moteur, la forme est la numéro 5 sur cette photo
Je ne pouvais pas mettre un moteur plus puissant (au final, un moteur brushless de 300W)au vue des batteries que je pouvais emmener si je voulais conserver une autonomie raisonnable. La voilà finite :
Cela a été testé, mais abandonné. Cela m'aurait permis une étanchéité parfaite, mais passé une certaine vitesse du moteur, des pas sont sautés, jusqu'à que le mouvement ne soit plus transmit du tout ... Dommage, la proposition dans ce RC-marine n°4 (collector !) de Juillet 94 était séduisante !

à compléter...

 Bon, j'avoue, je n'ai pas fais des centrales nucléaires à l'échelle ... vous ne m'en voudrez pas de cette lacune !
Bon, j'avoue, je n'ai pas fais des centrales nucléaires à l'échelle ... vous ne m'en voudrez pas de cette lacune !
Le moteurs est un brushless d'une puissance au rendement maximum de 300W , monté sur un variateur de vitesse du commerce.
Les batteries sont présente au nombre de 3 :
Il y a plusieurs systèmes d'armes :
Puis par les 16 trappes de missiles nucléaires :
La propulsion des missiles à été envisagé tout d'abord par un ressor puissant, puis ensuite, par action-réaction comme les fusées à eau (à suivre...)
Elle se fait par deux systèmes :
Une radio Futaba 4 voies proportionnelles est utilisée. Sur le modèle, on peut dénombrer 15 voies théoriques :
Dans une certaine plage de profondeur, le périscope est sortie, dans une autre, le TAF, la signalisation lumineuse est allumé uniquement en surface si la luminosité est inférieure à un seuil pré-réglé, toujours en surface, les bits d'ammarage sortent automatiquement au bout d'un certain temps d'inactivité, les brumisateurs sont allumés lors de l'amorce d'une plongée, les ballasts sont gérés automatiquement, seul la profondeur est ordonnée. (voir le paragraphe électronique)
Donc la radio ne contrôle directement que 9 (les 9 premières)
mode propulsion → mode armes→ mode options → ...
Une pression sur le manche gauche vers la gauche fait revenir au mode propulsion, peut importe le mode en cours. Les 3 autres manches ont des fonctions suivant le mode sélectionné. A la mise sous tension, le sous-marin apprend quelle est la pression atmosphérique en surface pour pouvoir effectuer les autres calcul par la suite. La profondeur maximale, de 4m d'usine peut être à tout moment réduite dans le mode configuration. On est ainsi assuré, dans des eaux troubles, de pas aller se mettre dans la vase ... Ensuite, la profondeur est réglable à 4cm près de 0 à 50cm de profondeur, puis à 25cm prés de 0,5 à 4m.
 |
 |
| changement de mode | Utilisation du mode |
Le détail des modes est donné ici
Un mode démonstration est également présent. il consiste à actionner les commandes de manière aléatoire pour intriguer le visiteur lors d'éventuelles expositions ...
Le contrôle de la profondeur (via le MPX2200AP de motorola, le MPX2100AP n'étant pas dispo lors de ma commande...), de l'assiette, la démultiplication et automatisation de certaines voies, le mode démonstration est réglé par le microcontrôleur 16F877 de microchip. Voici le circuit final :
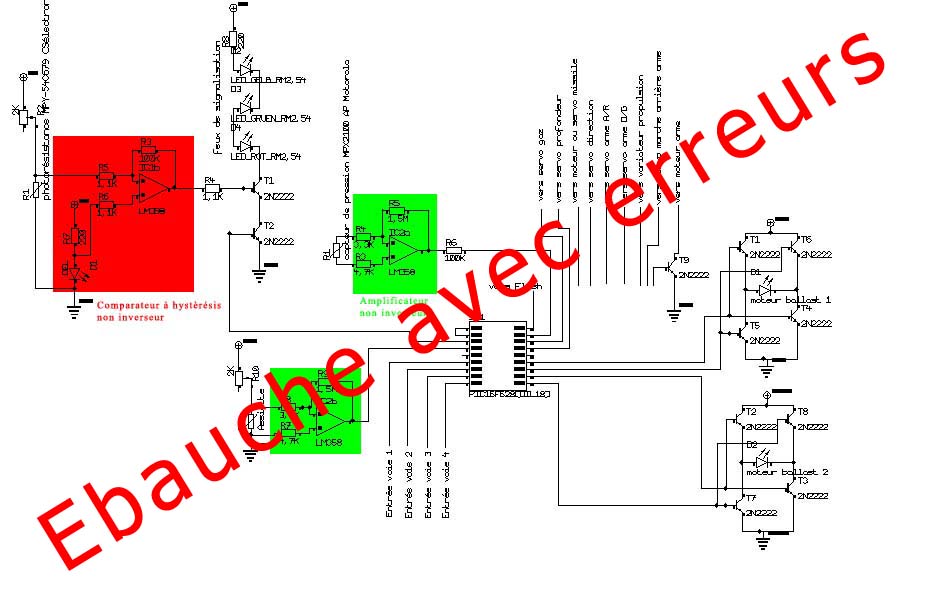
Tout le développement de cette partie est donnée sur cette page . En pratique, cela donne l'utilisation décrite dans le paragraphe radio.
On peut ce demander pourquoi avoir utiliser une méthode si compliqué alors que d'autres personnes ont réaliser des sous-marins tout à fait opérationel avec des moyens beaucoup plus simple. en fait, au fur & à mesure de l'élaboration de mes objectifs, j'ai été obligé d'utiliser le microcontroleur. À partir de ce moment, il était dommage de ne pas utilser toute la puissance de ces petites bêtes, alors de fil en aiguille, j'en suis arrivé à ce qui est décrit ici !
Différentes disciplines existent en modélisme, outre le traditionnel modèle statique, pour les modèles naviguant, on peut différencier ces activités :
Donc en somme, faire du sous-marin modèle réduit, c'est participer à toutes les épreuves en même temps (si on oublie la voile ...), c'est ce qui fait sa complexité, mais aussi son attrait !
La taille des couples ont été mené à bien dans la forêt en face de chez moi ...
Les cales pour tenir le balsa en position ont été réalisé avec des conserves achetées spécialement pour l'ocasion ! (j'en avais pour 3 mois je pense ...)
Ponçage en plein air, mais avec une ponceuse électrique !
voici quelques photos qui illustrent tout ça !
Globalement, cela m'a coûté environ XXX€. Le détail est donnée sur cette page.
Elles seraient un peu hâtive, étant donnée qu'il n'est pas fini... Revenez plus tard, je mets le site à jour au fûr et à mesure !
Histoire et actualités du SNLE-NG Le
Triomphant modèle réduit
Caractéristiques principales
Si vous voulez des renseignements quelconque sur les techniques mises en oeuvres ou sur le modèle, vous trouverez mon mail en bas de page
Pour ce qui est du lieu où construire le modèle, il est certain que je le ferais plus chez moi, dans mon lieu de vie ! J'ai avancé à vitesse grand V, mais j'ai habité un atelier pendant 5 mois. Il vaut mieux aller dans un club si on est pas préssé...
à suivre ...
 S'initier à la programmation des PIC par Allain Reboux
S'initier à la programmation des PIC par Allain Reboux 

Thierry pour ces conseils avisés sur la stratification, les forumeurs de Zones sous-marins qui ont répondu à mes questions, le patron de Modeland & les vendeurs de Quai West qui ont pris le temps de me répondre en détail, quelques internautes ça et là, ainsi que ... .... mes voisins (!) du village universitaire de Bordeaux qui ont subit sans rien dire les bruits et les odeurs toujours présentes même si la maximum des choses ont été réalisé en plein air.





{kind=link}
{kind=link}